




序言:
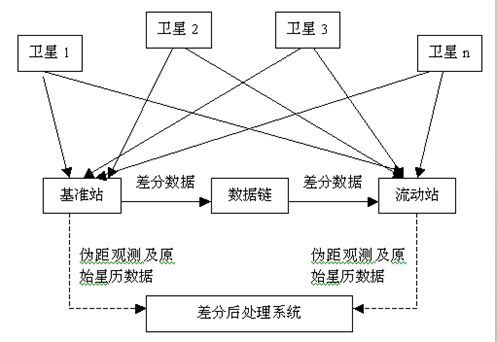
差分定位(Differential positioning),也叫相对定位,是根据两台以上接收机的观测数据来确定观测点之间的相对位置的方法。
可以简单的理解为在已知坐标的点上安置一台GPS接收机(称为基准站),利用已知坐标和卫星星历计算出观测值的校正值,并通过无线电设备(称数据链)将校正值发送给运动中的GPS接收机(称为流动站),流动站应用接收到的校正值对自己的GPS观测值进行改正,以消除卫星钟差钟差、接收机钟差、大气电离层和对流层折射误差的影响。
高性能RTK差分定位导航系统
RTK(Real - time kinematic)实时差分定位是一种能够在野外实时得到厘米级定位精度的测量方法,它的出现极大地提高了野外作业效率。
系统组成:
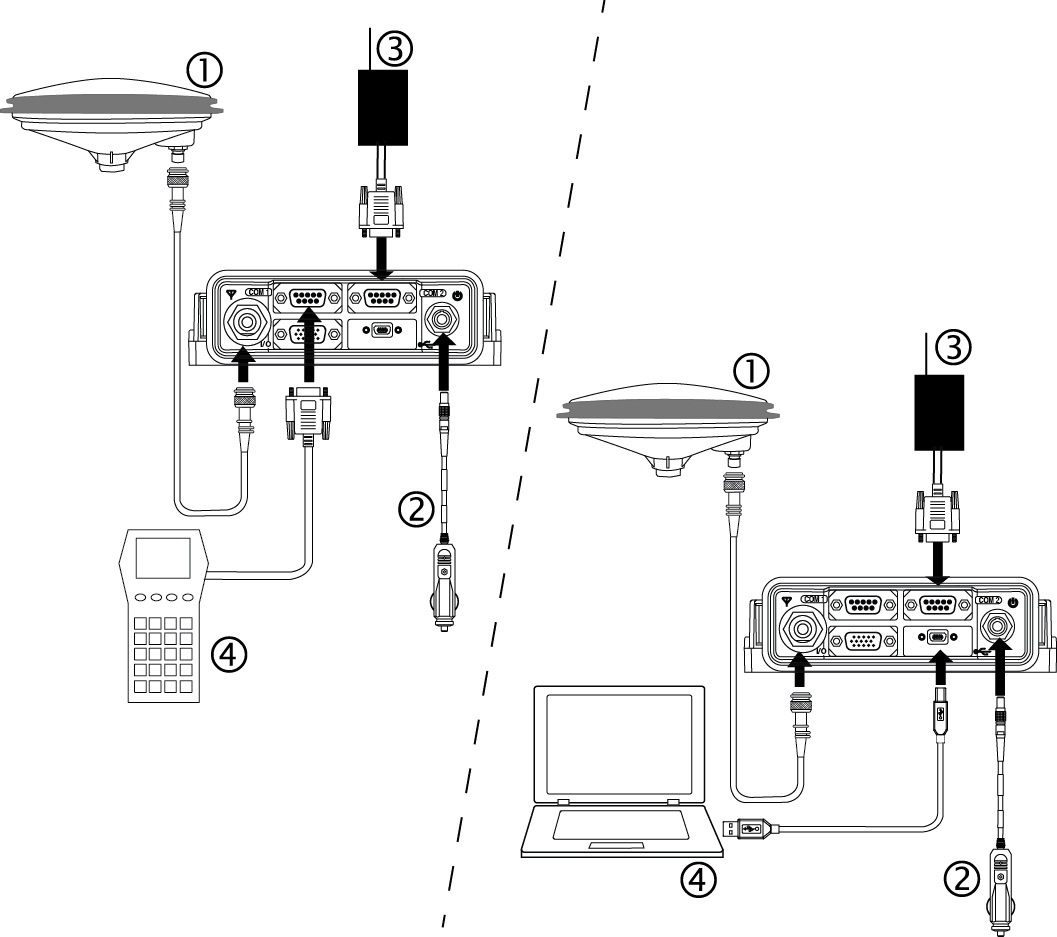

主要技术指标:
a)移动站和基准站之间的传输距离:200Km(最大);
b) 相对位置坐标测试精度:1cm+1PPM(RMS),速度精度:≤0.03m/s(RMS);
c) 传输数据更新率为:1Hz、2Hz、5Hz等;
d) 一次实验最长时间:≥8小时;
e) 工作环境温度:-40℃~60℃;
f) 工作环境:适用于机载挂飞、船载等恶劣环境;
g) 设备要求按照BJG150进行防水、防潮、防盐雾、抗腐蚀处理。
系统的主要功能:
a) 实时测量载机的位置、速度、姿态和状态等信息并下传到中心站;
b) 实时监控待测目标载体的位置坐标、航迹、速度和姿态等参数;
c) 建立测试系统坐标系,实时计不少于三个运动目标的相对位置关系、位置、方位角、距离和速度等;
d) 长时间数据存储,并可进行事后回放和分析处理;
e) 计算被测目标的方位角、距离和速度,提供实时引导数据;
f) 发送用户的控制指令;
g) 能够以图形、曲线、数字等方式实时显示方位角、目标距离、目标速度的GPS测量结果和探测分系统测试结果;
h) 能够显示和输出目标运动轨迹和攻击点;
i) 记录GPS/INS组合惯导原始数据,联合基准站原始观察数据做事后处理,得到高精度的测量数据。
系统构建推荐:


如有类似需求,请联系七维航测黄邓军,13811608576,给您推荐解决方案。
【北京七维航测】
北京七维航测科技股份有限公司成立于2003年,于2011年在全国中小企业股份转让系统成功挂牌(证券简称:七维航测;证券代码:430088),主营业务面向航天、航空、航海、兵器、电子、电力、交通等领域。2007年,北京七维航测作为业内仅有的两家公司之一被选为中国惯性技术学会会员单位。
公司主要的业务领域有:航测业务涉及GNSS/INS组合导航系统、GNSS高精度差分系统、姿态测量系统等产品的研发生产、销售、技术服务;检测业务基于高精尖传感器提供测量应用、数据采集系统应用;北斗应用涵盖高精度组合导航应用、同步授时应用、高精度北斗RTK应用;监测业务提供桥梁、尾矿库、水库大坝、地质灾害、基坑等安全监测服务。无人飞机业务覆盖无人飞机系统集成等领域。公司将在原有的提供优良设备、技术的基础上,提供有价值的服务,大力发展服务型项目。
公司成立十余年来,一直为各重点院所、高等院校及相关企业提供GNSS基准系统、高精度授时系统、GNSS/INS组合导航系统、高速运动目标测量基准系统及专业的技术服务;为北京市创新工程《城市轨道交通噪声特性与噪声地图技术研究项目》提供了安全检测系统;为北京地铁13号线、新疆果子沟大桥、沪蓉西高速公路的四座特大桥提供了健康监测系统;为中国某新型飞机提供了力反馈控制系统;为黄河春季破冰进行了无人飞机系统的开创性应用;公司还为我国首艘航母 “辽宁舰”进行了平台基准系统标校服务。
公司秉承“,精益求精”的质量方针和“科技创新,专业制胜”的经营策略,使公司的整体实力得以快速提升。2013年,公司被《福布斯》评为《2013福布斯中国最具潜力的企业》。公司已获得武器装备质量体系认证证书、二级保密资格单位证书和武器装备科研生产许可证证书。
附:
位置差分
安装在基准站上的GPS接收机观测4颗卫星后便可进行三维定位,解算出基准站的坐标。由于存在着轨道误差、时钟误差、SA影响、大气影响、多径效应以及其他误差,解算出的坐标与基准站的已知坐标是不一样的,存在误差。基准站利用数据链将此改正数发送出去,由用户站接收,并且对其解算的用户站坐标进行改正。
伪距差分
根据基准站已知坐标和各卫星的坐标,求出每颗卫星每一时刻到基准站的真实距离。再与测得的伪距比较,得出伪距改正数,将其传输至用户接收机,用户利用此测距误差来改正测量的伪距。最后,用户利用改正后的伪距来解出本身的位置,就可消去公共误差,提高定位精度。
伪距差分是目前用途最广的一种技术。几乎所有的商用差分GPS接收机均采用这种技术。国际海事 无线电委员会推荐的RTCM SC-104也采用了这种技术。
实时载波相位差分(RTK)
实时载波相位差分与伪距差分不同,基准站不再计算伪距改正数,而是将其观测的载波相位观测值由数据链路实时传给移动站,由移动站接收机进行载波相位求差,再解算位置。
求差有单差、双差和三次差等三种数学模型。单差可消去卫星星钟钟差;双差可消去基准站与移动站接收机钟差;
移动站静止不动观测卫星若干历元,求解出相位整周模糊度。