




无人机汽车水下机器人Xsens MTI-300/30 AHRS姿态和航向参考系统
MTi-300/30 AHRS是一款微型3自由度飞行姿态及航向参考系统,具有体积小、重量轻的特点。该产品包含3D加速计、陀螺仪、磁强计以及惯性测量装置。该产品的内置低功耗信号处理器可提供实时无位移3D方向、校准3D加速度、3D转弯速度以及3D地球磁场数据。

超高性能
MTi采用陀螺仪、加速计和磁强计来确定方向。Xsens先进的传感器融合算法可应对暂时磁干扰和短期加速,从而可以计算出实时方向数据。此外,MTi软件开发工具包还含有磁场映射程序,可以纠正硬/软铁影响。
高精度专用设置
MTi的用途十分广泛,内嵌传感器融合滤波算法适应性极强,适用于不同的应用领域,并可确保较高精度。公司已经对传感器融合滤波设置进行了校准测试,能够符合不同的应用要求,也可以根据用户的特殊要求进行专门设置。按照应用要求正确设置可确保较高的设备性能,而且为用户节省了调试时间,同时避免了调试不准确的情况。

灵活性强
MTi可与软硬件设备同步(包括SyncIn和SyncOut,即,同步输入和同步输出)。功能全面的软件开发包可以对MTi进行全面控制,而且配有多种接口,可连接直观的Windows图形界面软件、API二进制库(Windows、Linux系统)以及提供源代码执行MTi二进制通信协议,可与任何平台集成使用。MTi可以帮用户快速解决问题。
【名词解释】
【IMU惯性测量单元】陀螺和加速度,输出角速度和加速度值;
【VG垂直陀螺】输出的是在IMU基础上进行实践积分后得到的姿态(俯仰和横滚)角度值(角速度单位是°/S,角度单位是°跟速度和位移的区别一样;
【AHRS航姿参考系统】一般加了磁场计(相当于指南针、罗盘),输出航向、姿态角度等值;
【INS惯性导航系统】一个使用加速计和陀螺仪来测量物体的加速度和角速度,并用计算机来连续估算运动物体位置、姿态和速度的辅助导航系统;
【NAV组合导航(松耦合)】GPS辅助输出三维坐标、姿态和航向所有信息;
【GPS/INS组合导航(紧耦合)】GPS和INS深度融合输出三维坐标、姿态和航向所有信息。
Xsens的MTI产品目前有7名家庭成员:

1 MTI-10 IMU:惯性测量单元:输出3D加速度,3D转速和3D地磁磁场,不分析数据来定向
2 MTI-20 VRU:垂直参考单位:偏航角是未参考的
3 MTI-30的AHRS:姿态和航向参考系统:完整陀螺增强姿态和航向参考系统,输出无漂移的横滚角、俯仰角和真北
4 MTI-100 IMU:惯性测量单元:输出3D加速度,3D转速和3D地磁磁场,不分析数据来定向
5 MTI-200 VRU:垂直参考单位:偏航角是未参考的
6 MTI-300 AHRS姿态和航向参考系统:完整陀螺增强姿态和航向参考系统,输出无漂移的横滚角、俯仰角和真北
7 MTI-G-710/700 GPS / INS :GPS辅助惯性导航系统
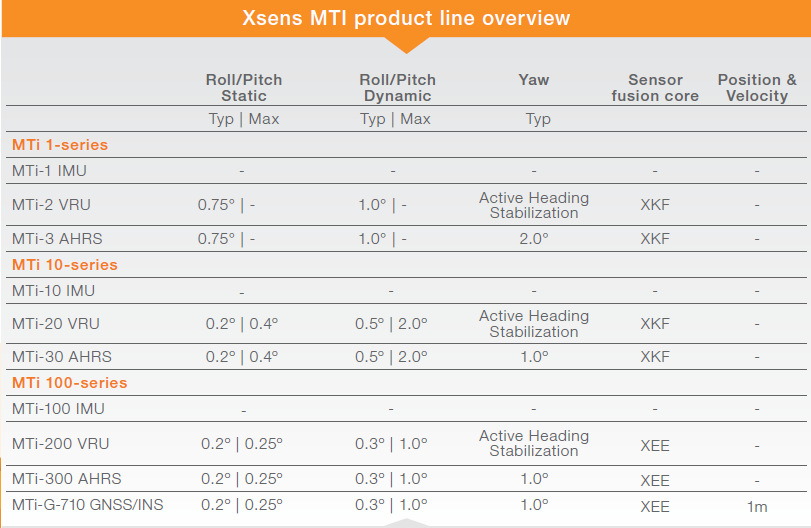
MTI 10系列和MTI 100系列(包括MTI-G-710 GPS / INS)的区别:
这两个系列虽然具有相同的软件和硬件接口,也仍然存在几个显著差异。
陀螺仪:MTI-10系列采用偏置稳定性为18 /h的工业陀螺仪。MTI-100系列采用了最新的振动抑制陀螺仪,运行偏置稳定性为10/h,噪声密度和g灵敏度也有显著降低。后一款产品从而具有更高的抗振动性、磁场畸变环境中更好的方向性,以及整体上更为可靠的方位。 传感器融合算法:MTI 10系列的定向计算采用了经过验证的 Xsens卡尔曼滤波器(XKF3i)的传感器融合算法。而MTI-100系列使用Xsens评估引擎(XEE)估计方向和位置,为一款功能强大的工具,超越了传统的卡尔曼滤波的传感器融合算法。 XEE更为灵活,并且能够更好地处理测量离群或畸变项。 MTI-100系列的校准是更广泛的,充分受益于所有规格的陀螺仪。MTI-100系列包括MTI-G-700 GPS / INS,为该系列产品(Xsens MTI-G,于2007年推出)中首款GPS / IMU集成产品的继任者。MTi-G-700为GPS辅助定位,所以长久加速无影响。当GPS暂时不可用时,INS会及时填补GPS中断的空缺,并确保获得相比GPS位置和速度更高的完整性。由此产生的位置更新速率最高可达400 Hz。
主要参数
|
GPS接收机 |
横滚/俯仰精度 |
|
50通道,L1 C/A码 |
静态(1σ) 0.2° |
|
更新率4Hz |
静态(最大)0.25° |
|
GPS L1 C/A的水平精度CEP 2米 |
动态(1σ) 0.3° |
|
启动时间冷启动27S |
动态(最大)1° |
|
GPS L1 C /垂直精度CEP 5米 |
航向精度 1度 |
|
跟踪灵敏度 -161dBm |
水平位置精度(1σ)1米 |
|
|
垂直位置精度(1σ)2米 |
|
输入电压 4.5-34v |
速度精度 0.1米/秒 |
|
时钟漂移 10 ppm |
陀螺加计 |
|
典型功耗675-950mW |
陀螺测量范围 450°/s |
|
输出频率 最高2kHz |
零偏稳定性10°/h |
|
启动时间2.5秒。 |
加速度计范围50m/s2 |
|
IP等级IP67 |
加速度计精度40g |
|
接口RS232/422/UART / USB |
|
|
工作温度 40~85C |
|
应用领域
航天领域,汽车,机器人水下设备,利用为MTi-G配套的开发软件,MTi-G可以很容易的集成到其他的系统当中去。 具体适用于医疗、运动检测、训练、虚拟现实、生物工程系统、体育、惯性导航系统、人体姿态测量、飞机姿态控制、转速测量、仿真等。 利用为MTi-G配套的开发软件,MTi-G可以很容易的集成到其他的系统当中去。


如有类似需求,请联系七维航测黄邓军,13811608576,给您推荐解决方案。
【荷兰Xsens】
Xsens公司研制开发出最先进的小型MEMS惯性传感器(加速计、回转仪)、辅助技术(GPS/GNSS、视觉、气压计、磁场传感器)及具有所有权的“传感器融合”软件算法。该公司的传感器融合技术可在现实世界和数字世界之间实现无缝交互,产品应用遍及工业控制与稳定、健康、体育和3D角色动画等等。至今已成功将数以万计的运动传感器和运动捕捉解决方案应用于3D角色动画、康复和运动科学以及机器人和相机稳定装置等领域。
其客户包括:美国艺电(Electronic Arts)、NBC 环球集团(NBC Universal)、戴勒姆(Daimler)、欧特克(Autodesk)、ABB、西门子(Siemens)以及其它的机构与公司。